톱메뉴



메인메뉴





























HOME > 제품소개 > Motor Controller > DC series
DCxxxx-DID(200W)


FEATURES
제품특징:
- 2개의 200W급 DC모터 독립제어 가능
- Real-Time 위치/속도/전류제어 기능
- DirectFET 채용으로 방열성능 극대화 및 소형화 실현
- 다중모터제어 통신방식(RS232/485/CAN)
- User Programmable Sequence 제어 기능
- 외부입출력 : 4×2 Analog/Digital I/O port
- 넓은 전원입력 범위
FUNCTION
|
|
CUBE-DC2408-DID |
CUBE-DC3606-DID |
CUBE-DC4804-DID |
|
Number of Motors to Drive |
2 ea |
2 ea |
2 ea |
|
Nominal Supply Voltage |
24V |
36V |
48V |
|
Min / Max Supply Voltage |
10V / 30V |
12V / 45V |
12V / 60V |
|
Continuous Coil Current Amplitude(1) at Ta=25℃, 20KHz PWM |
8A |
6A |
4A |
|
Maximum Momentary Coil Current Amplitude |
16A |
12A |
8A |
|
PWM Frequency |
20KHz ~ 100KHz |
|
|
|
Control Output and Method |
current / speed / position, unipolar / bipolar current control |
||
|
Position Sensor |
encoder |
|
|
|
Back EMF Reducing Resistor |
50W power resistor |
|
|
|
RS232C / RS485 / CAN / EtherCAT |
RS232(~115.2Kbps), RS485(~2.5Mbps), CAN(~1Mbps) |
||
|
Among RS485 and CAN, only one can be selected by command. |
|||
|
External I/O |
total 8 input or output (some analog and some digital) |
||
|
Operating Ambient Temperature |
0℃ ~ 50℃ |
|
|
|
Size (L×W×H, without case) |
80mm × 50mm × 17mm |
||
|
Weight (PCB and Bottom Heat Sink) |
44g |
|
|
|
|
|
|
|
|
Comment (1) Depends on Additional Heat Sink and Ambient Temperature and PWM frequency. |
|||
|
|
|||
|
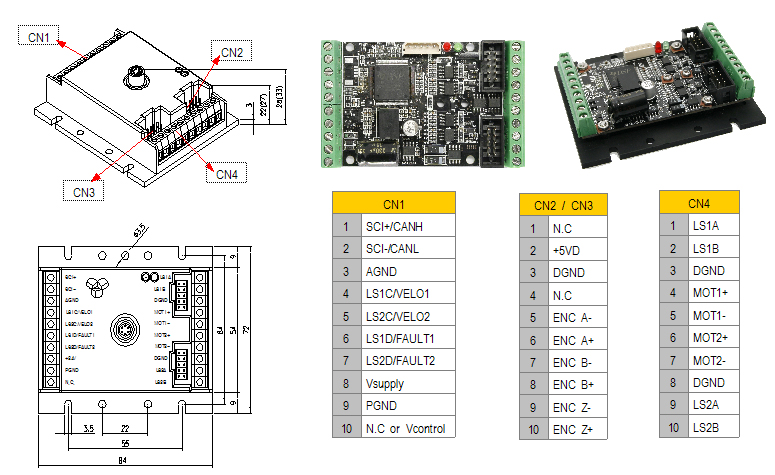
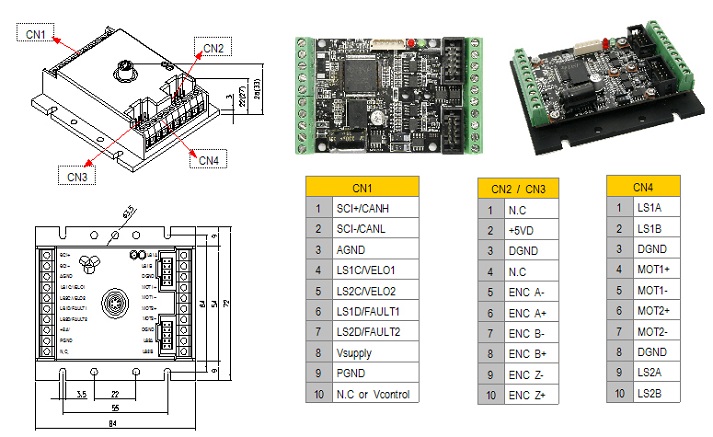
Dimensional Drawing & Picture & Connector |
|||
|
|
|||



- 유틸메뉴

